PBR Primitives and Intersection Acceleration
basic thoughts
- spatial subdivision ---- kdTree
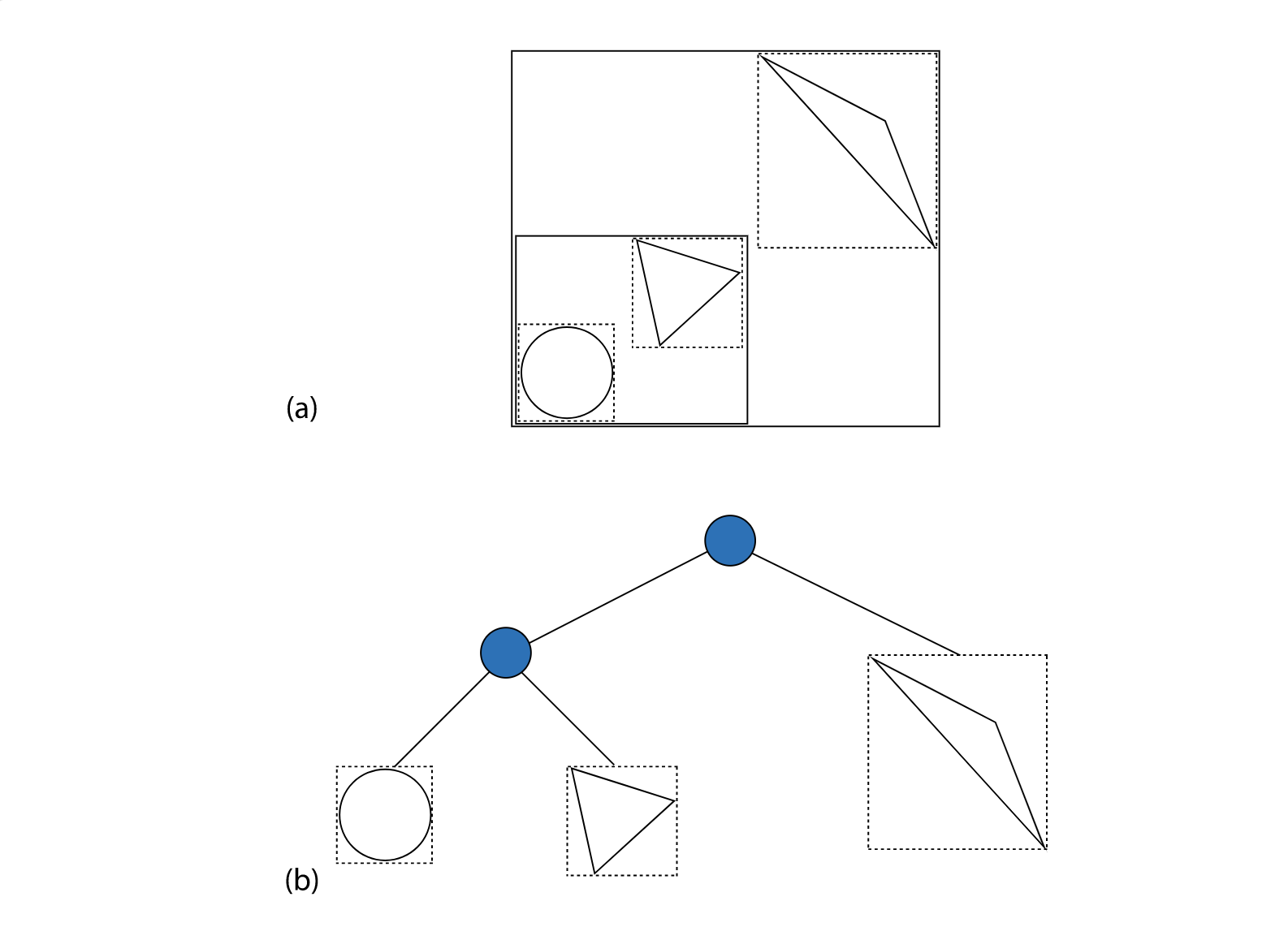
- object subdivision ---- BVH object subdivision is based on progressively breaking the objects in the scene down into smaller sets of constituent objects.
BVH
basic principle
根据object的bounding box分布,把物体划分成树的结构。
BVH construction ways
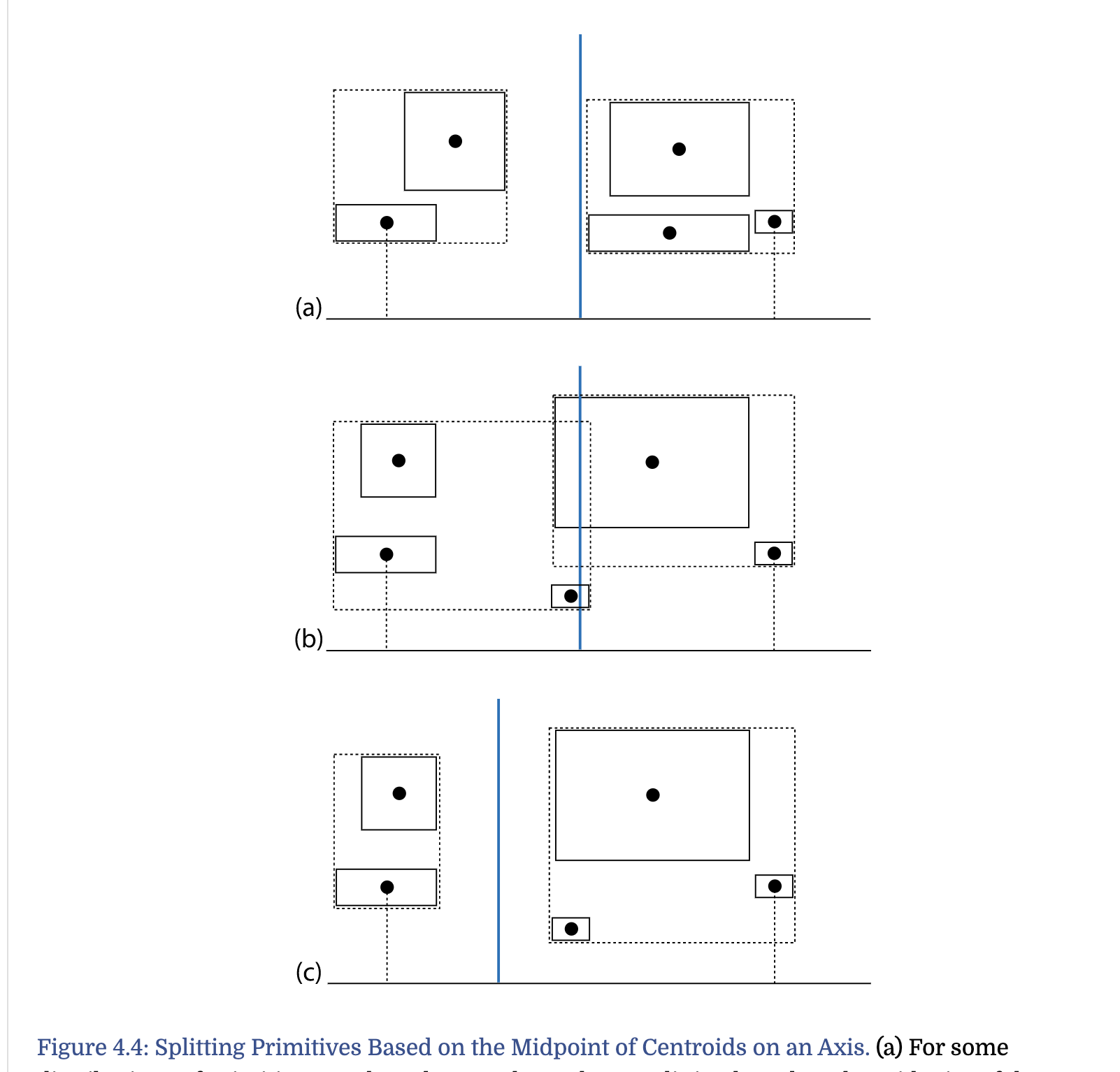
middle
- choose the partition axis has the largest range of the centroids of the primitives’ bounding boxes
- split primitives based on the midpoint of centroid on chosen axis
equal counts
- split primitives based on mid count of sorted centroid on chosen axis
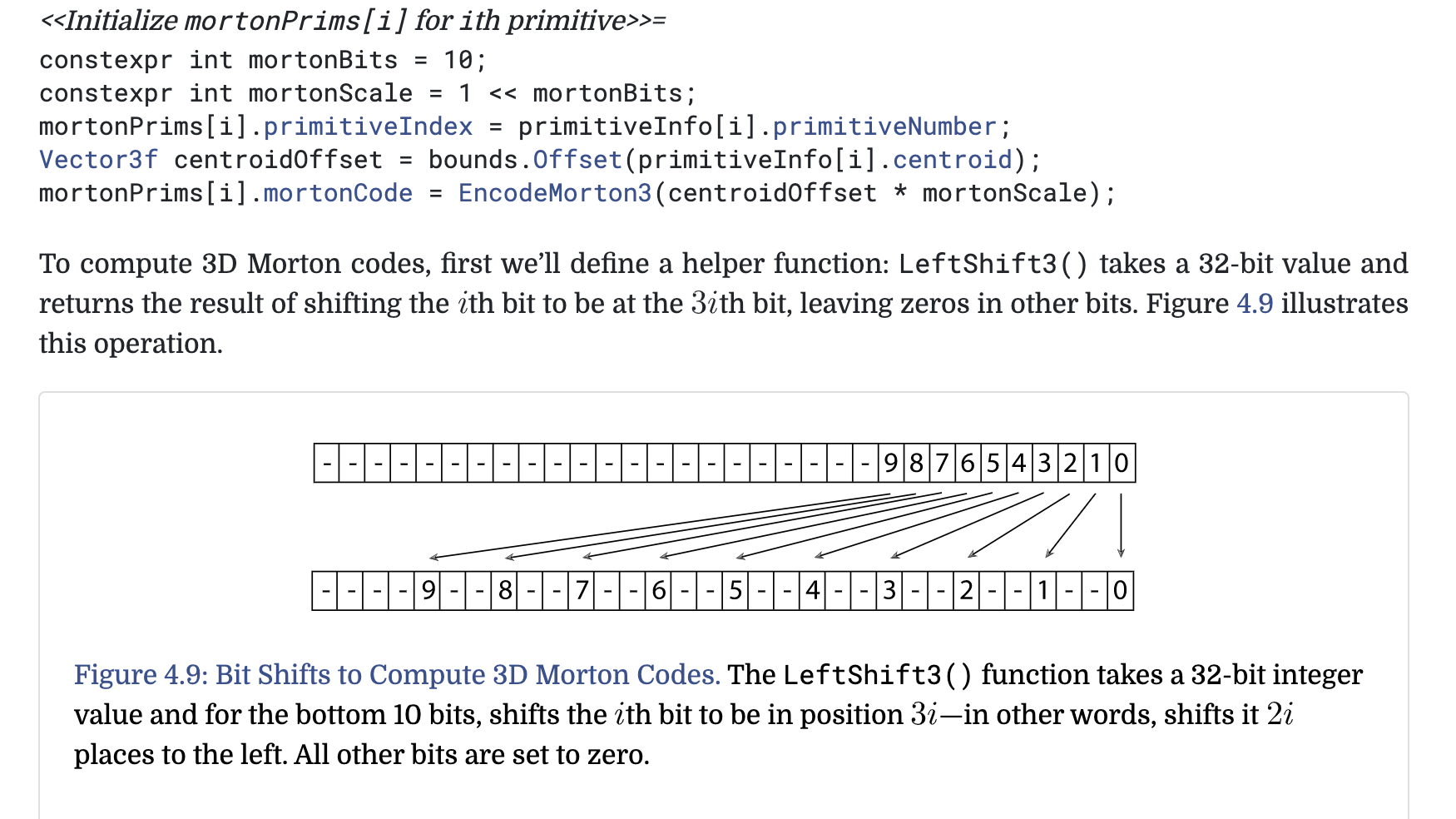
surface area heuristic (SAH)
- based on cost
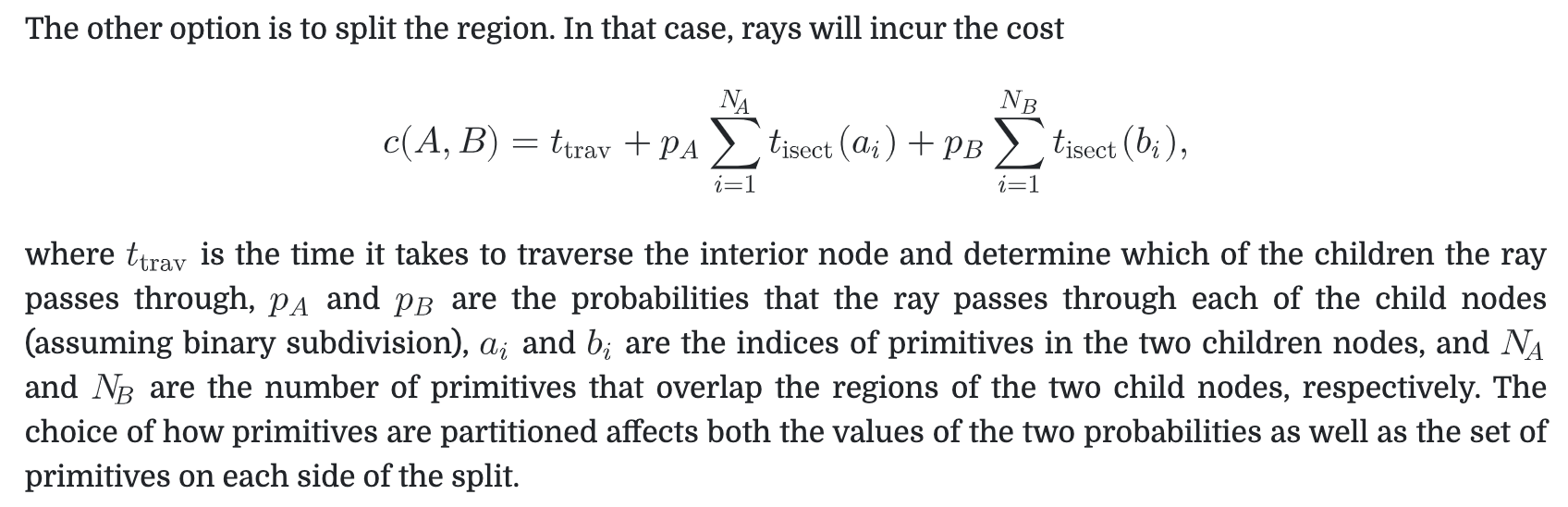
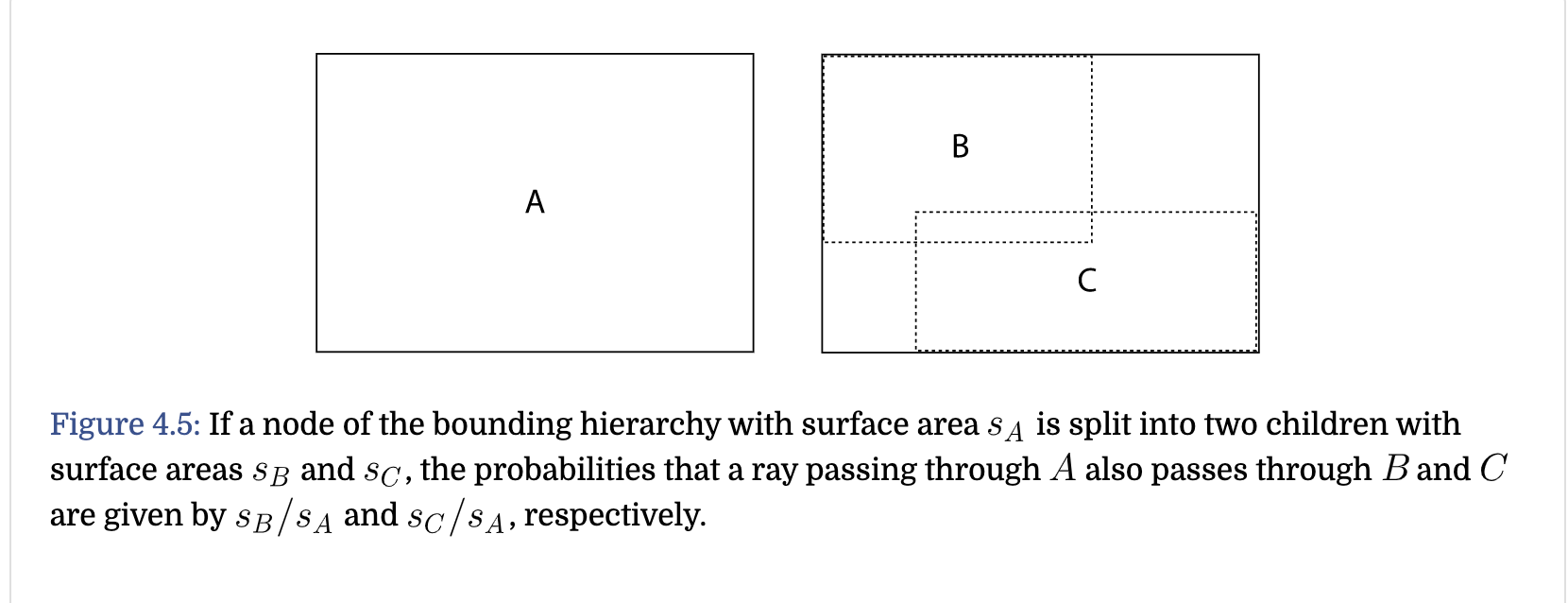
- probability based on surface area(bounding box 的表面积)
- each primitive is placed in a bucket along the axis based on the centroid of its bounds
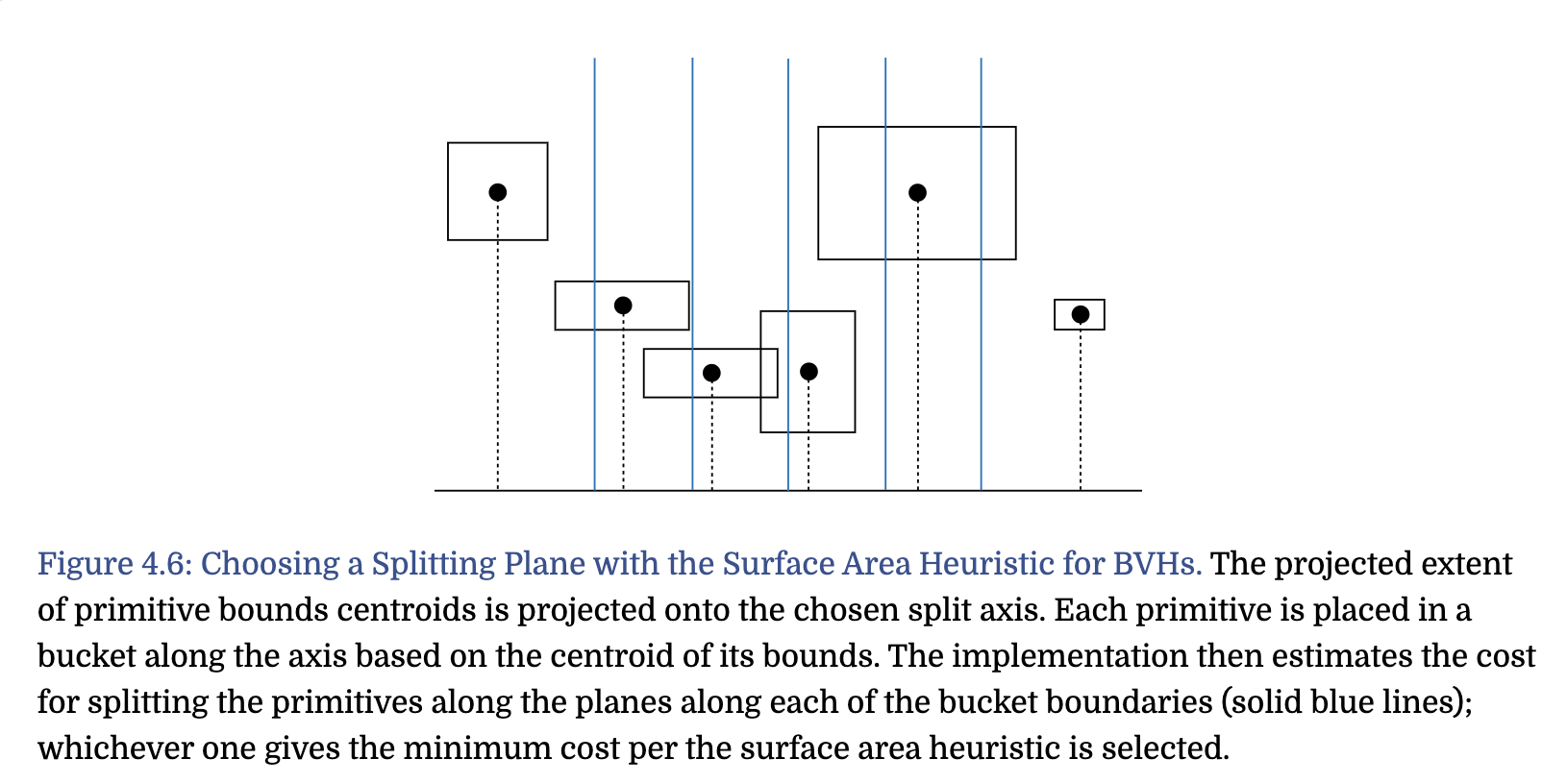
- cost each cost for each bucket boundary
 这里假设,遍历树的cost是0.125,树节点求相交的cost是1.0
这里假设,遍历树的cost是0.125,树节点求相交的cost是1.0
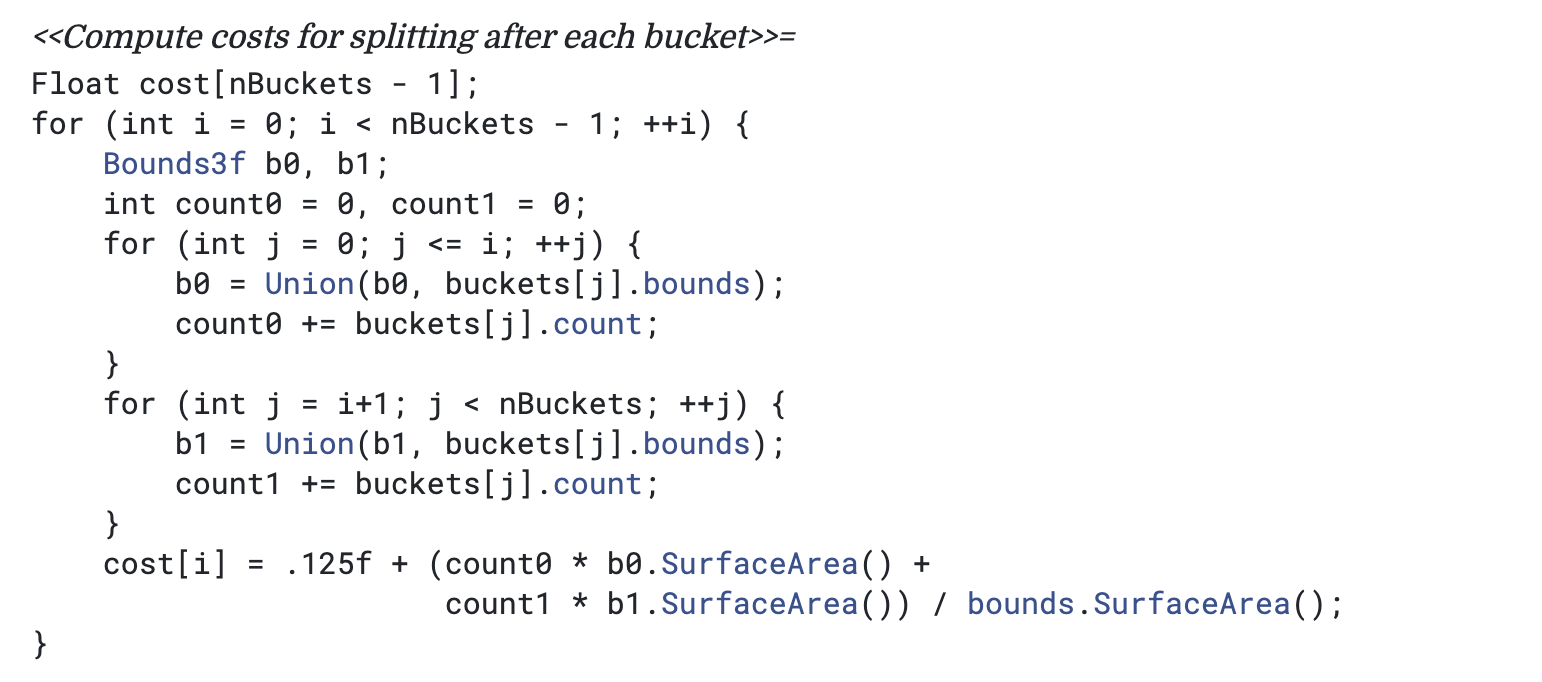
linear bounding volume hierarchies
- Mortan code
把各个维度的坐标(整数值)转换成2进制编码
 Mortan编码的好处是,index接近或者说高bit位相同的分布在临近的区域
Mortan编码的好处是,index接近或者说高bit位相同的分布在临近的区域
- hierarchical linear bounding volume hierarchy (HLBVH)
低层次的树采用Morton-curve-based clustering,高层次的树采用surface area heuristic
简单的说用Morton来做各个分桶里的BVH,用SAH做桶的BVH
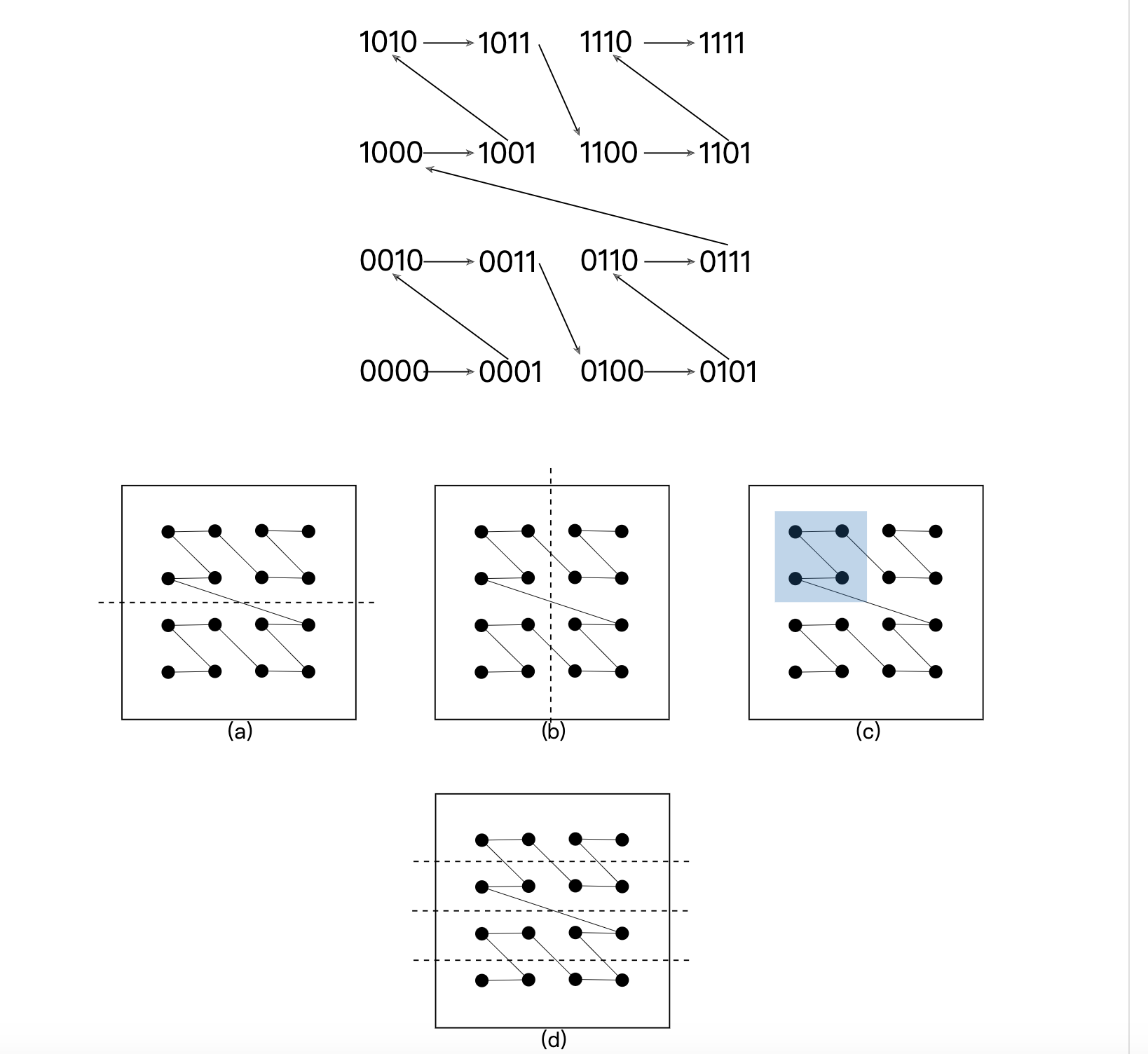
- 计算所有primitives的centroid的boundingbox
- 计算每个primitive的centroid的Mortan code
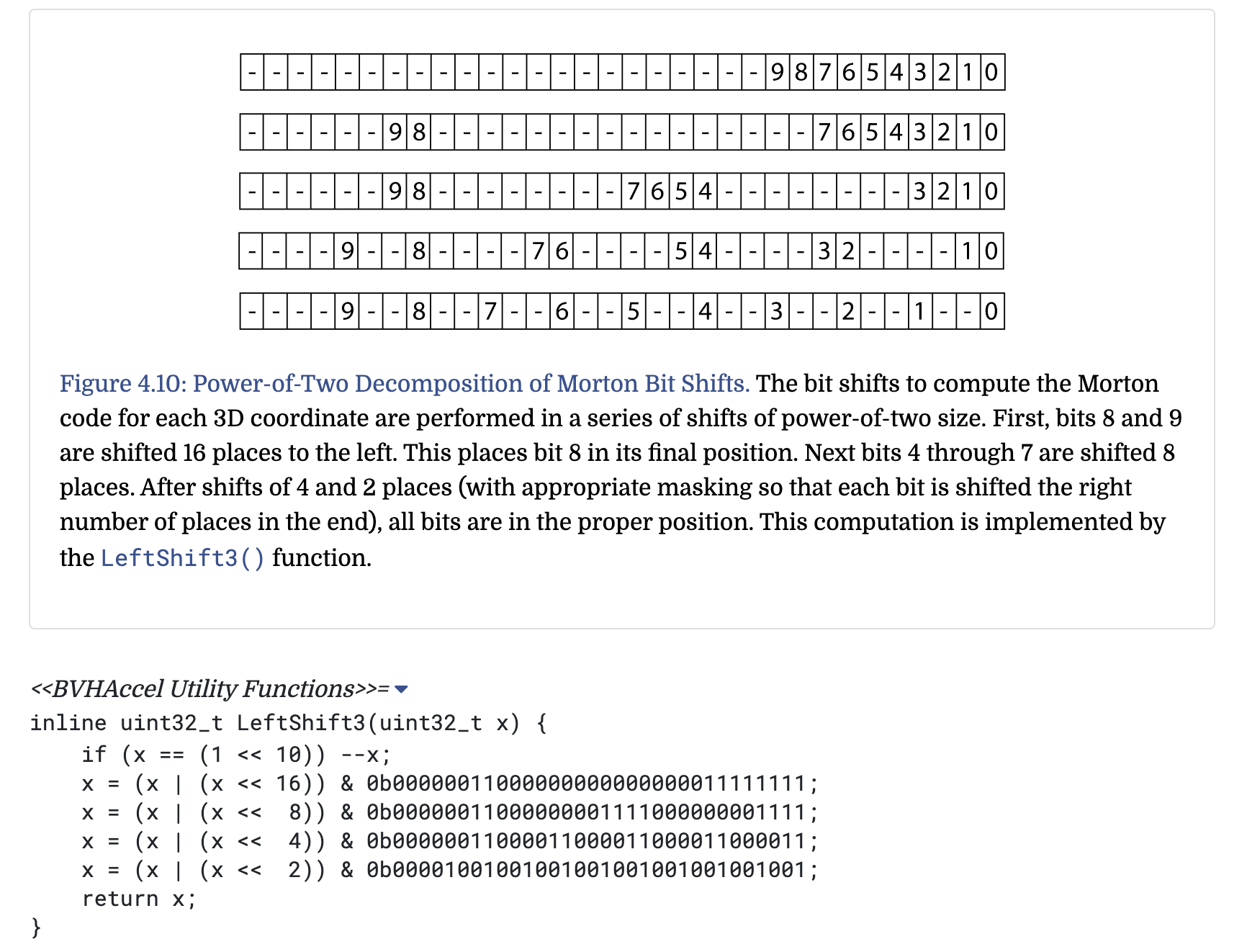
x, y, z每个维度计算相对于所有centroid的bdbox的offset,归一化到[0, 1]. 每个维度用10个bit编码,归一化的offset乘以2^10取整编码。
 通过多次移位编码成Mortan code
通过多次移位编码成Mortan code
- 每6个bit一起做sort
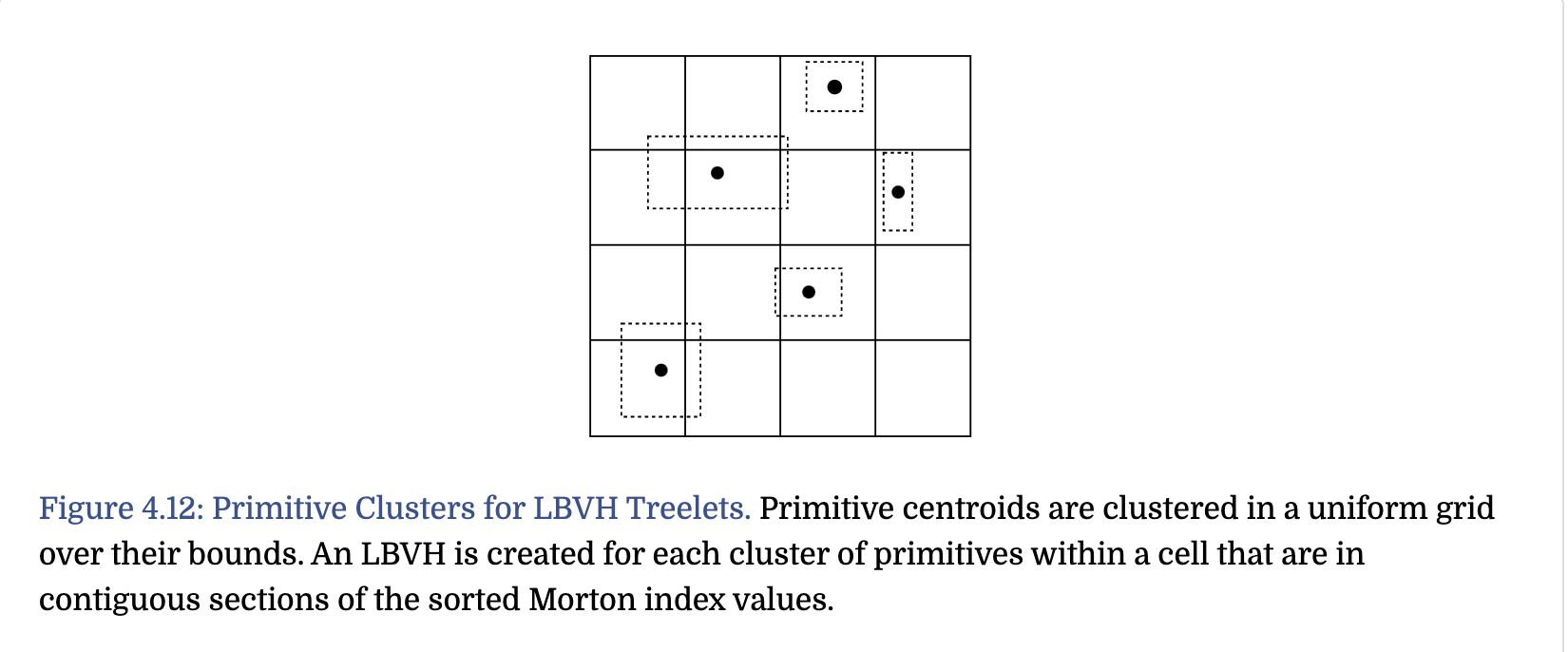
- 前12个bit开始构建BVH
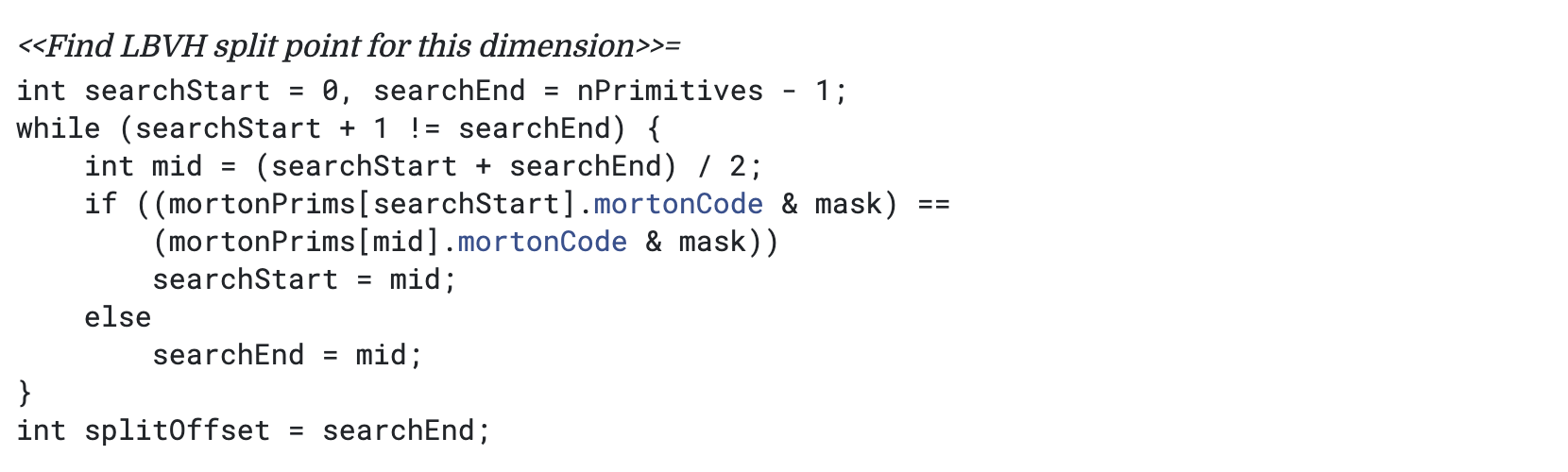
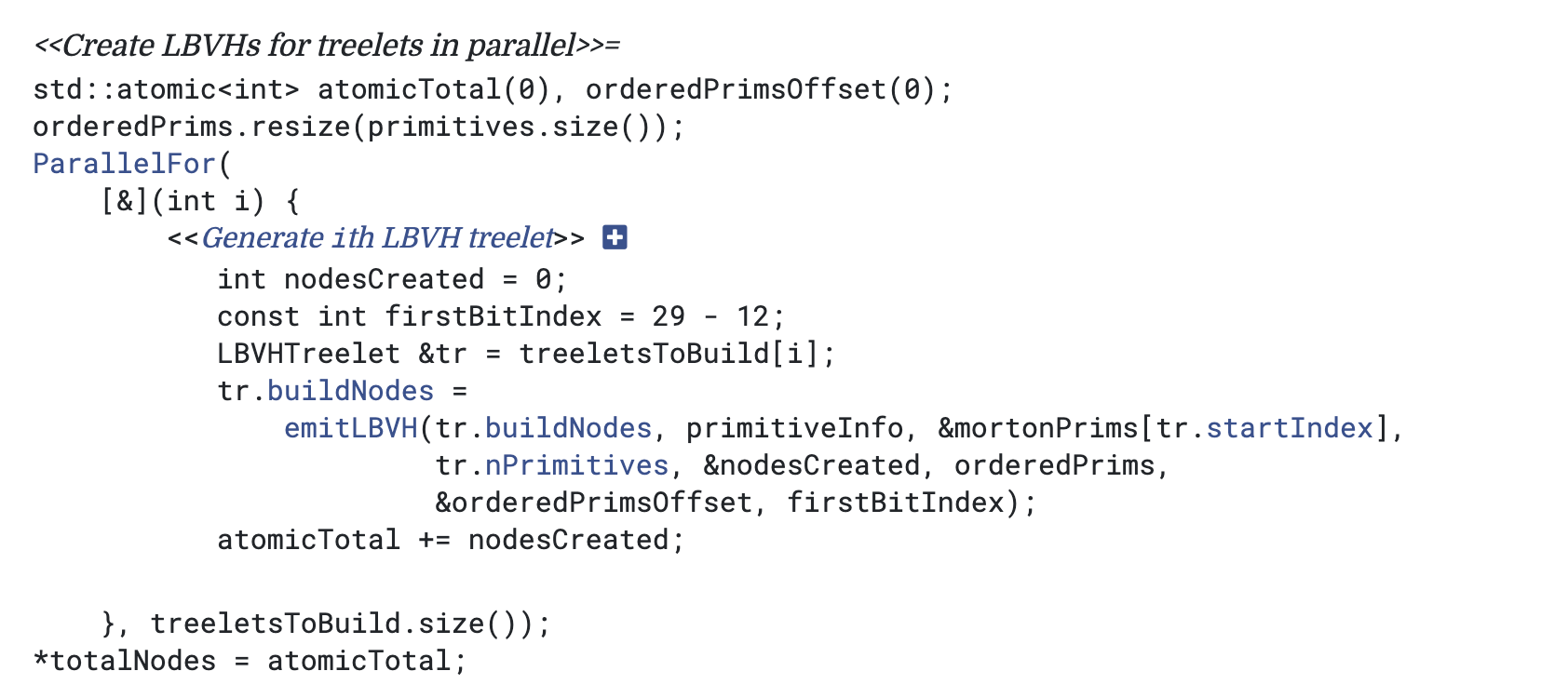 根据前12个bit分线程,然后依次根据下一个bit进行分支构建节点,根据bit位不同进行分支
根据前12个bit分线程,然后依次根据下一个bit进行分支构建节点,根据bit位不同进行分支
- for前12个bit的桶进行SAH BVH构建
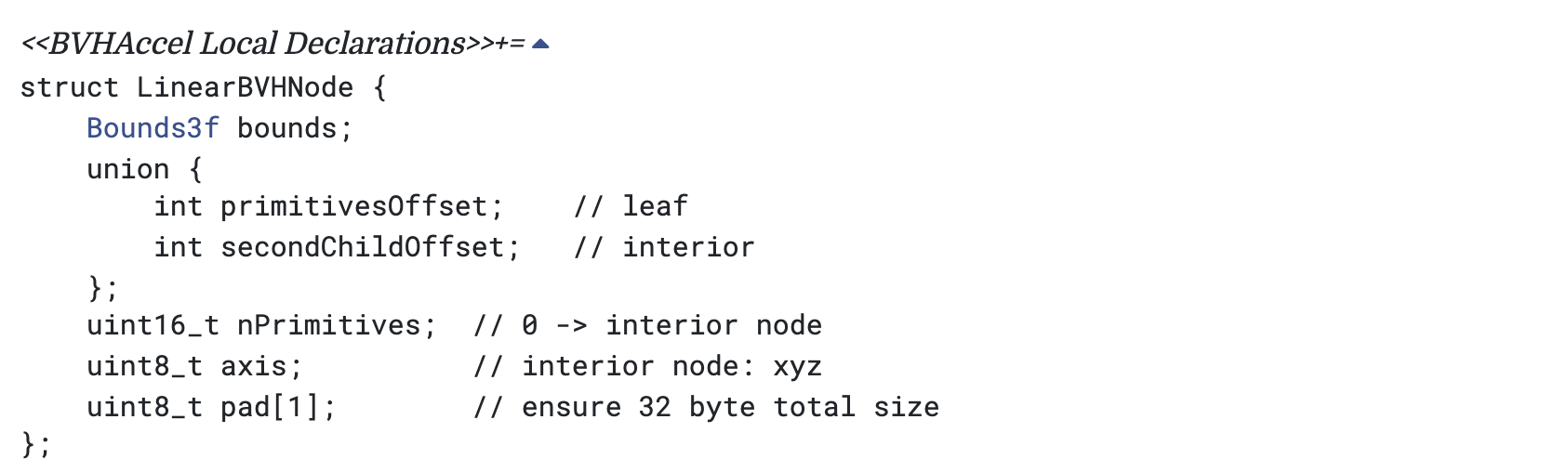
compact BVH
深度优先
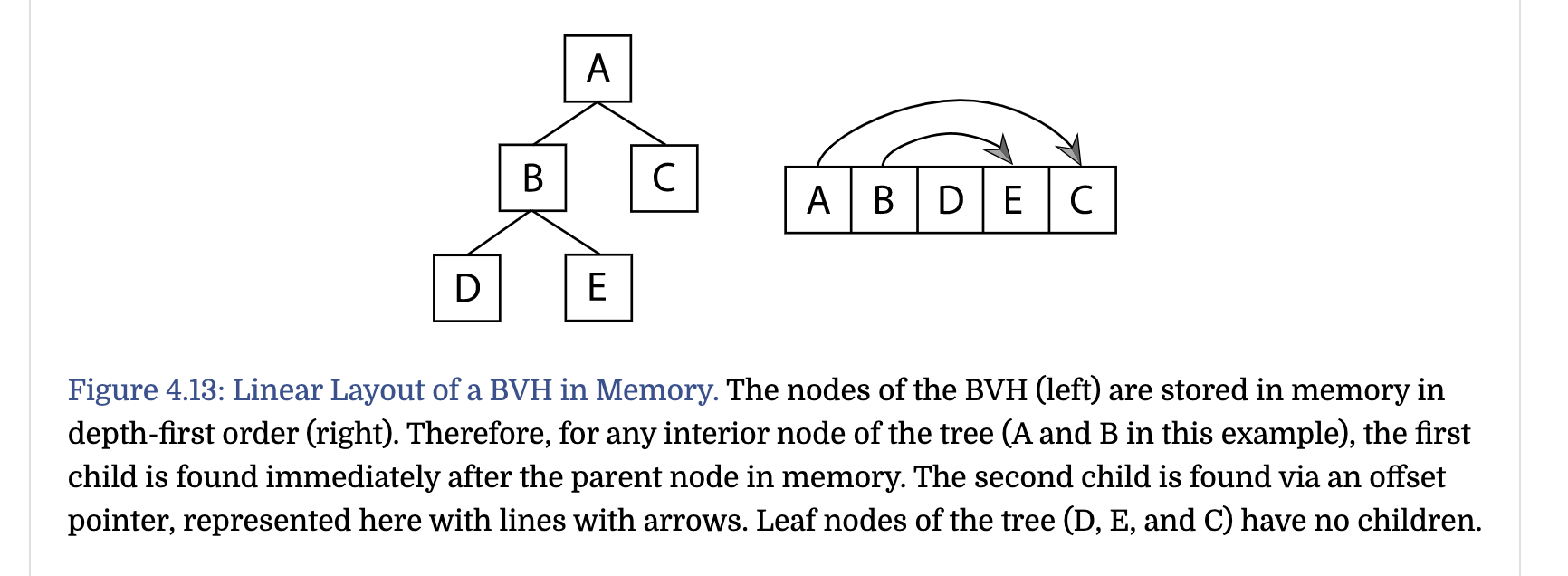 每个左节点会记录下兄弟节点的offset
每个左节点会记录下兄弟节点的offset
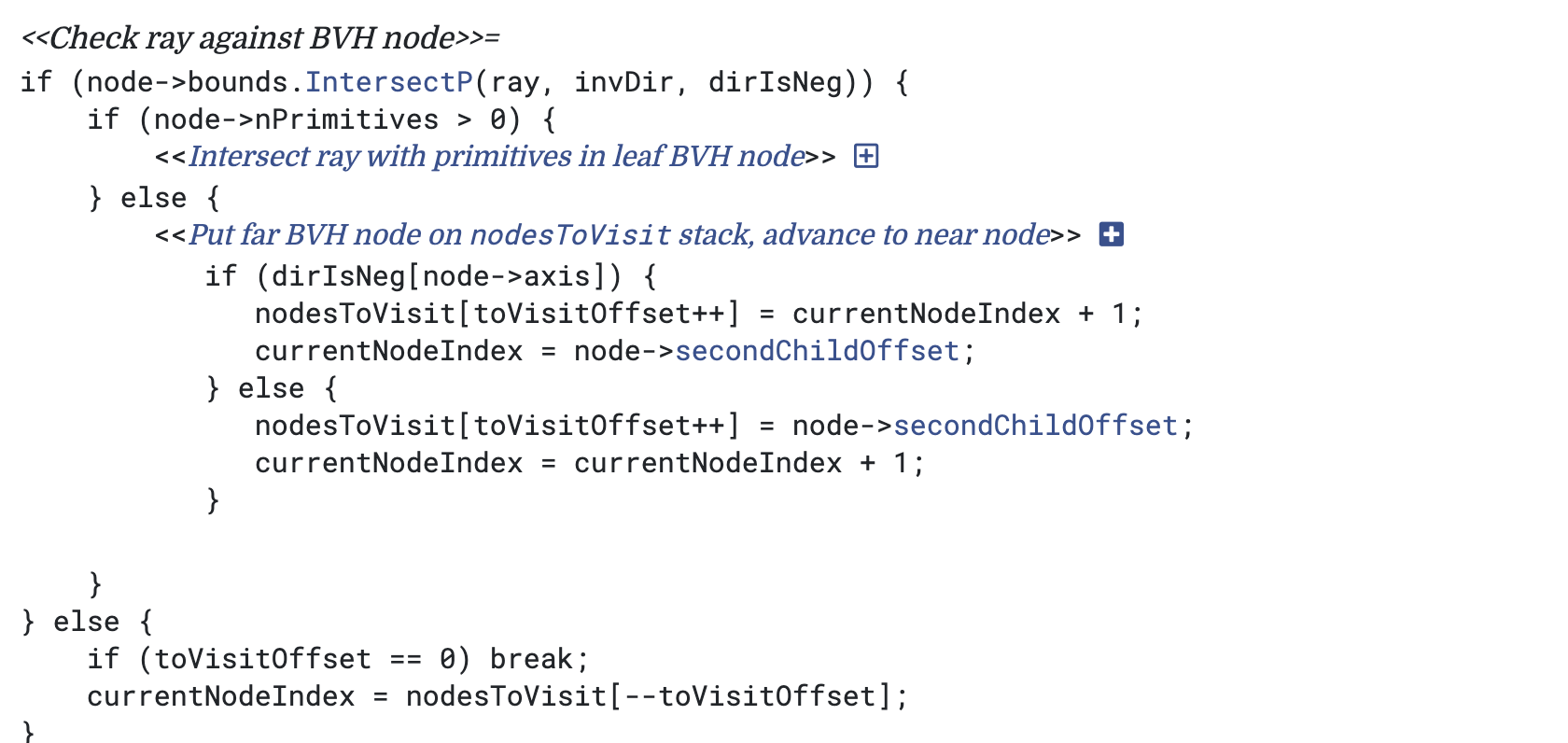
traversal
从root节点开始判断
for more efficiently, 根据ray相对于axis的朝向决定优先和左子节点还是右子节点求交
Kd-Tree
BSP and kd-tree
- Binary space partitioning (BSP) trees adaptively subdivide space with planes.
- Two variations of BSP trees are kd-trees and octrees.
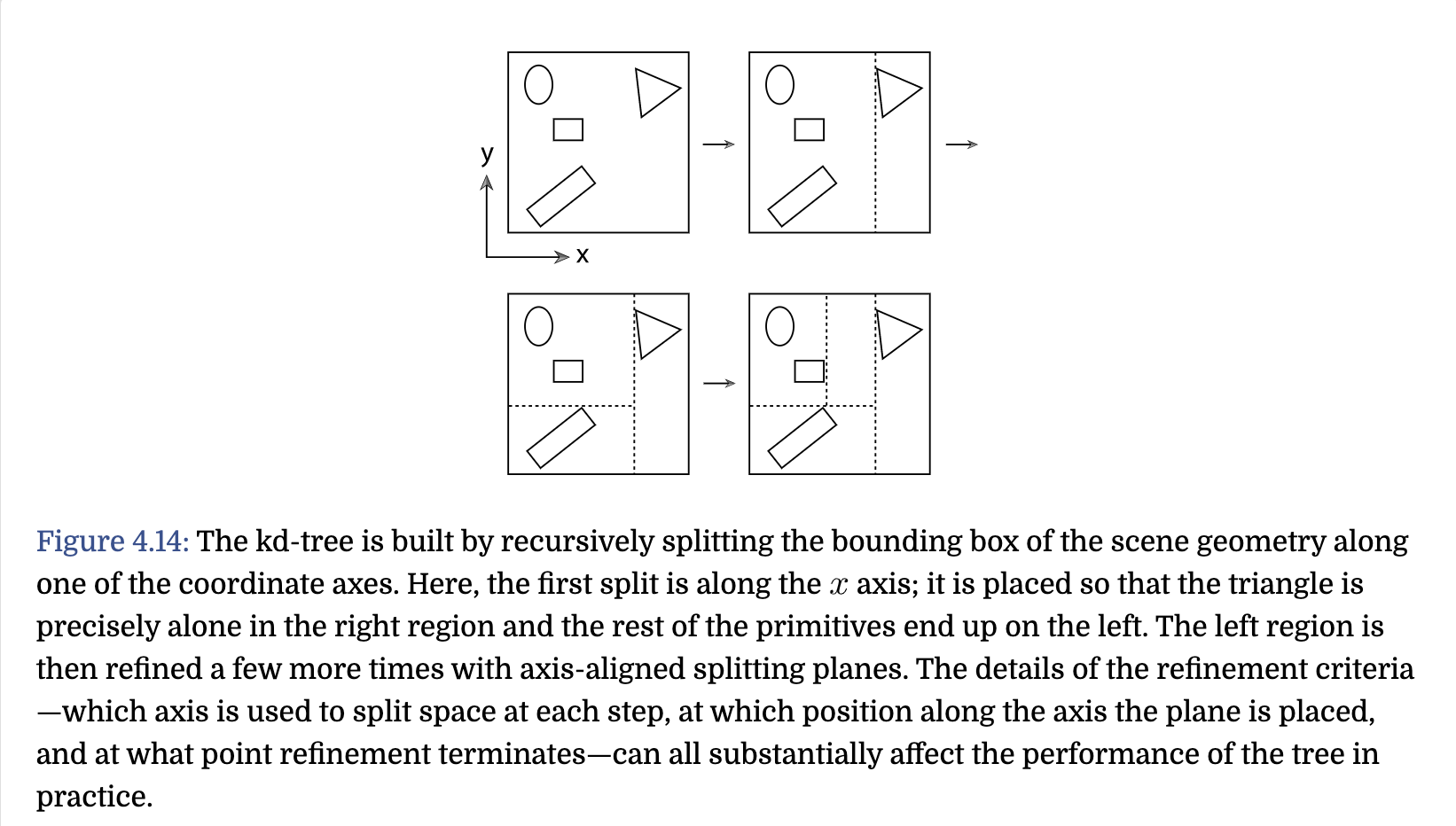
tree representation

tree construction
- built with a recursive top-down algorithm